中国科大物理学院、合肥微尺度物质科学国家研究中心张榕京和袁军华研究组在细菌运动机制的研究中取得重要进展,通过定量测量细菌在自由液体环境下游动时的力学条件及相关马达的构成,澄清了在这一领域长期存在的关于马达高负载假设的误解,并揭示了这种构成如何促进细菌运动的鲁棒性机制。相关成果于11月3日发表在《Science Advances》上。
细菌的运动对于其生存和感染宿主至关重要。由细菌鞭毛旋转驱动的游动是细菌最为典型的运动机制。对于大肠杆菌来说,每个细菌身上通常有3至7根鞭毛,每根鞭毛底部由一个转动分子马达(即鞭毛马达)驱动。当细菌身上的所有鞭毛马达逆时针旋转时,鞭毛会成束,从而推动细菌游动。每个鞭毛马达由转动部分(转子)和多个产生力矩的单元(定子)组成。每个马达最多可容纳11个定子,定子数会随它产生的力矩增加而增加,其稳定性表现出逆锁(catch bond)行为。鞭毛马达对其承受的力学负载非常敏感。在高负载区域,随着马达转速的增加,马达力矩基本保持恒定;而在低负载区域,随着马达转速增加,力矩急剧下降。一直以来,大家普遍认为细菌在自由液体环境游动时,鞭毛马达工作在高负载区域。大量关于细菌游动的研究都是基于这一观点展开的。研究组设计马达复活实验(图1)发现,细菌在自由液体环境游动时,鞭毛马达内定子数平均约为满态的一半,这表明此时马达工作在低负载区域。研究组进一步通过改变环境液体粘度,测量了单个马达的力矩-转速关系曲线,直接证实了马达工作在低负载区域。因此,这一发现推翻了先前的普遍认知,揭示了细菌在自由液体环境游动时,鞭毛马达实际上工作在低负载区域,马达内平均定子数为满态的一半。
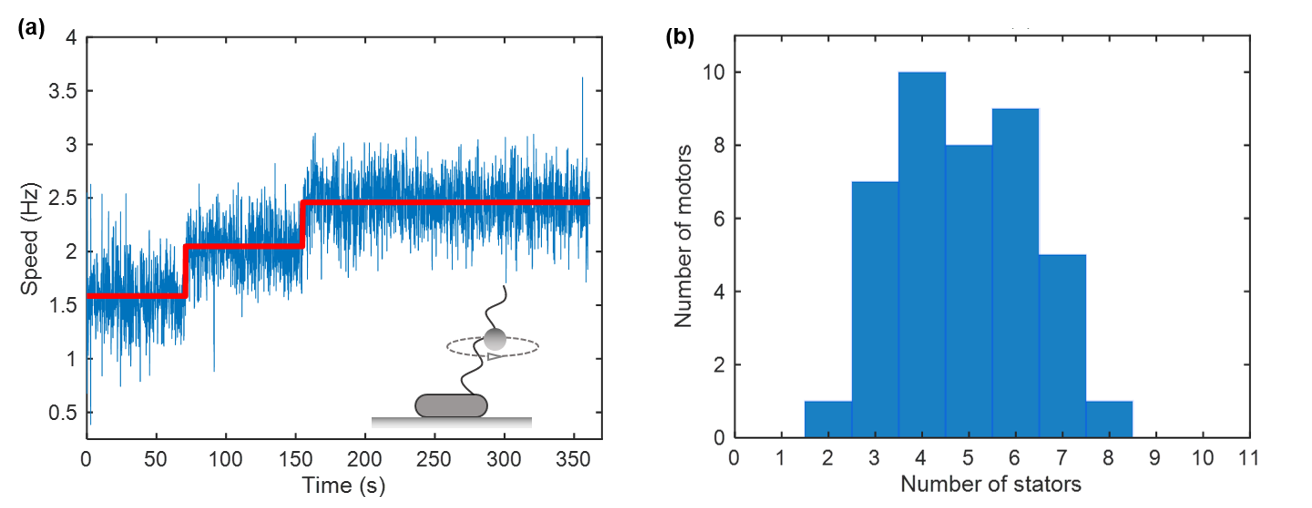
图1.(a)马达复活实验。在零时刻突然增加马达负载,发现马达转速一步一步增加,说明初始时马达定子数未满。(b)实验测量的细菌在自由液体环境游动时,鞭毛马达内定子数统计分布,发现平均定子数为满态(11个)的一半。
这种定子数半满的状态使细菌能够根据外部条件的改变来动态调节定子数量。为了探索其生理意义,研究组测量了含不同数量鞭毛的鞭毛束的旋转速度,发现当鞭毛数量为3个或更多时,转速随鞭毛数量的变化保持恒定,这表明细菌游动对鞭毛数量的变化具有鲁棒性。研究组进一步设计了微流控实验(图2),结果发现,当外部环境液体的粘度突然增加时,鞭毛束的转速迅速下降,然后逐渐恢复,这表明细菌的游动对外部负载条件的变化具有鲁棒性。研究组用动态定子数调节的机制定量地解释了这两种鲁棒性。
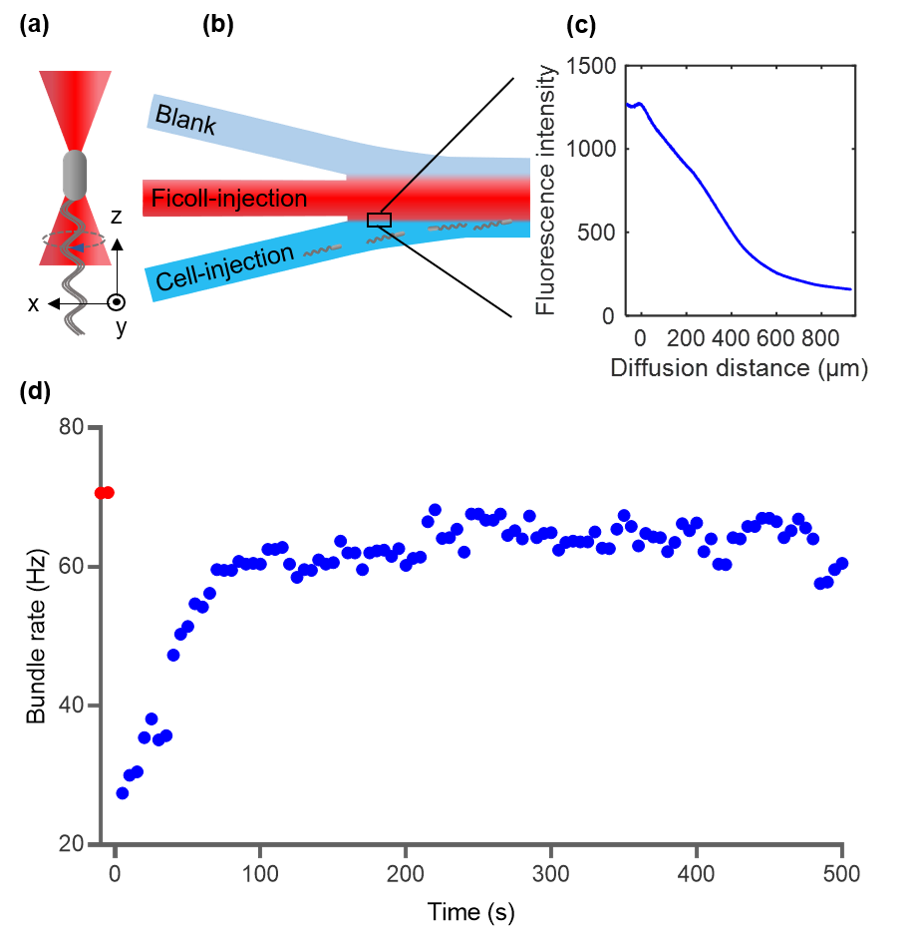
图2.微流控实验。(a)光镊抓住细菌。(b-c)微流管道形成界限分明的不同粘度的沟道,通过光镊移动细菌能迅速改变细菌的液体环境。(d)当细菌外界液体粘度突然增加时,鞭毛束转速随时间的变化。红色数据点代表低粘度下的转速,蓝色数据点代表粘度在零时刻突然增加时,转速的变化。
因此,细菌在自由液体环境游动时,其鞭毛马达实际上在低负载区域工作,马达内的定子数为半满,这使得细菌能根据外部条件动态调节定子数量,从而赋予细菌游动对外界环境变化的鲁棒性。
研究组博士生牛玉慧是该工作的第一作者。上述研究得到了国家自然科学基金委及科技部基金的支持。
论文链接:[backcolor=transparent !important]http://www.science.org/doi/10.1126/sciadv.adi6724



 提升卡
提升卡 变色卡
变色卡 显身卡
显身卡



 楼主
楼主